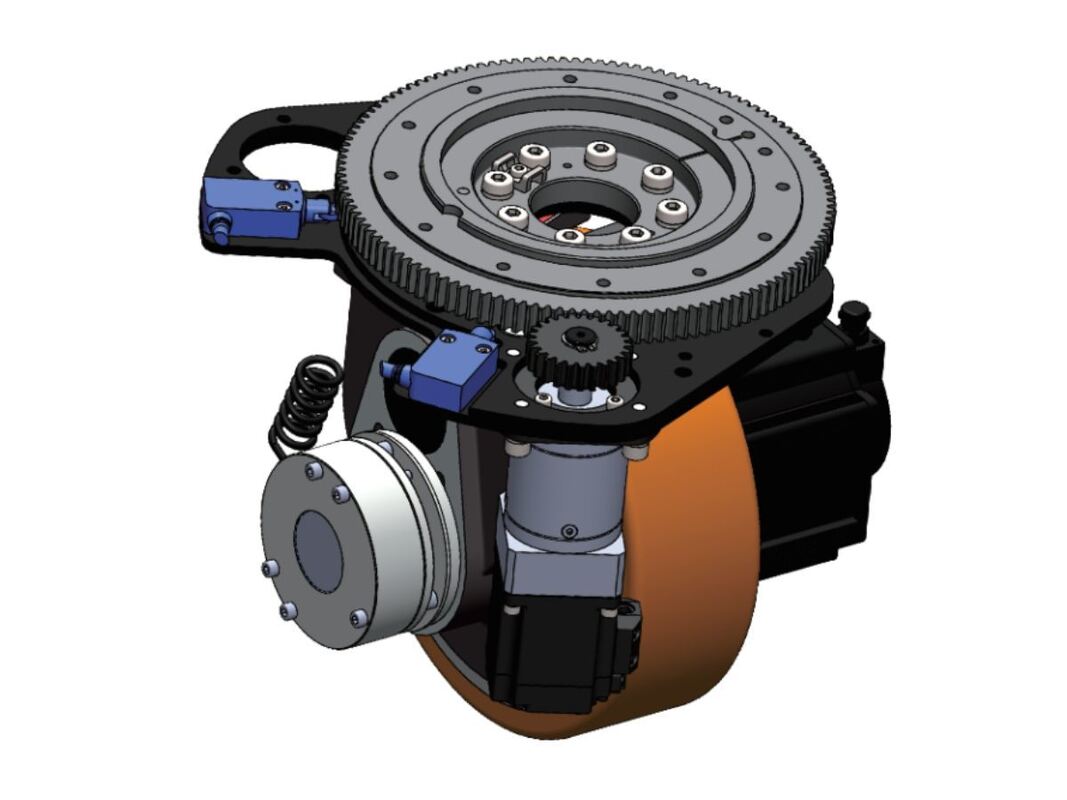
Description du module du volant AGV à entraînement horizontal à 360°
Le volant à traction horizontale de l'AGV est doté d'une conception unifiée qui comprend un moteur de direction, un mécanisme de transmission de réduction, une unité de rétroaction de position, un dispositif de limite,et un mécanisme rotatif, le tout dans un module compact.
Lorsqu'elle est associée à un contrôleur d'entraînement, une plate-forme mobile dotée d'un seul volant peut exécuter des commandes de démarrage/arrêt, avancer ou reculer et diriger.
L'utilisation de deux roues de direction ou plus améliore les capacités du système, permettant des virages à rayon zéro, des déplacements latéraux, une rotation omnidirectionnelle de 360°, des mouvements en ligne droite, des mouvements latéraux,Voyage en diagonale, et les chemins courbes facilitant le mouvement sans restriction dans n'importe quelle direction sur une surface bidimensionnelle.
Caractéristiques du module du volant à entraînement horizontal à 360° de l'AGV
Opération sûre
Un codeur de sécurité externe peut être intégré pour la surveillance de la vitesse et la connexion à un PLC de sécurité.
Le produit est conforme aux réglementations de sécurité de l'UE, y compris les normes CE et IEC.
Stable et fiable
Faible hauteur d'installation, haute précision, conception légère, capacité de charge élevée, couple élevé et grande vitesse.
Le système offre des performances fiables et une longue durée de vie.
Maintenance facile
Compatible avec les chaînes de traction inAGV* utilisant des câbles à haute flexibilité (alimentation, rétroaction, communication et mise en service), avec une durée de vie de pliage supérieure à 10 millions de cycles.
Les connecteurs stables et fiables permettent une installation en mode plug-and-play, éliminant ainsi les câblages complexes.
Une conception de blindage à 360° assure une forte capacité anti-interférence et une transmission fiable et sans perte de signal.
Soutien axé sur les solutions
En fonction des besoins de votre application, nous pouvons vous recommander des systèmes de navigation et de contrôle éprouvés dans l'industrie, y compris:LiDAR SLAM/Visual SLAM,Navigation électromagnétique,Navigation sur bande magnétique,Navigation par ruban de couleurCes solutions contribuent à accélérer le déploiement du système et à améliorer l'efficacité du développement, de la mise en œuvre, de la mise en œuvre et de la mise en œuvre.et les phases opérationnelles.
Spécification du module du volant AGV à entraînement horizontal à 360°
| Modèle |
Le produit doit être présenté dans les conditions suivantes: |
Le produit doit être présenté sous forme d'une couche d'équipement. |
Le produit doit être présenté sous forme d'une couche d'eau. |
Le produit doit être présenté sous forme d'une couche d'eau. |
Le produit doit être présenté sur le site de l'essai. |
Le produit doit être présenté sous forme d'une couverture. |
Le produit doit être présenté sous forme d'une couche d'eau. |
Le produit doit être présenté sous forme d'une couche d'eau. |
| Unité de déplacement (roue de traction horizontale série PHD) |
| Modèle de roue motrice |
Le produit doit être présenté sous forme d'une couche d'eau. |
Le produit doit être présenté sous forme d'une couche d'eau. |
Pour les appareils de traitement de l'air |
Le produit doit être présenté sous forme d'une couche d'eau. |
Le produit doit être présenté sous forme d'un produit. |
Le produit doit être présenté sous forme d'une couche d'eau. |
Le produit doit être présenté sous forme d'une couche d'eau. |
Le produit doit être présenté sous forme d'une couche d'eau. |
| Diamètre de la roue 150 mm 150 mm 190 mm 205 mm 210 mm 250 mm 270 mm 270 mm |
| Ratio des engins de déplacement |
10 à 17.5 |
16 à 24 à 34 |
20 |
16 à 32 |
24.7 |
17 à 32 |
17 à 32 |
16 à 40 |
| capacité de charge verticale |
300 à 400 kg |
600 kg |
900KG |
|
1150 kg |
1 000 kg |
1175 kg |
|
1 500 kg |
2500 kg ou plus |
| Portée de puissance |
0.2-0.5KW |
00,4-0,75 kW |
0.75 à 1.0 kW |
1.0-2.0 kW |
00,5-1,2 kW |
1.0-2,5 kW |
1.0-2,5 kW |
1.0 à 3.0 kW |
| Vitesse de la roue motrice 0-7 km/h 0-5 km/h |
0 à 5 km/h |
0 à 5 km/h 0 à 5 km/h 0 à 10 km/h 0 à 10 km/h 0 à 10 km/h |
| Le couple de la roue motrice |
Maximum de 48 N.m. |
Maximum: 280 N.m. |
Maximum: 210 N.m. |
Maximum: 440 N.m. |
Maximum: 235 N.m. |
Maximum: 450 N.m. |
Maximum: 450 N.m. |
Maximum: 800 N.m. |
| Unité de direction |
| Portée de puissance |
0.05 kW |
0.1-0.2 kW |
0.1-0.2 kW |
0.4 kW |
0.1-0.2 kW |
0.2-0.4KW |
0.4 kW |
0.75 kW |
Détecteur d'angle Encodeur incrémentiel & Encodeur absolu
Limites de direction |
Encodeur supplémentaire et encodeur absolu |
| Limites de direction |
Limite électronique et limite mécanique |
Les informations figurant dans ce tableau sont uniquement à titre de référence.
Pour une sélection de modèles spécifiques, veuillez contacter nos ingénieurs en application.
La personnalisation est prise en charge. |

 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères!