Présentation de la main robotique dextre HONPINE 07
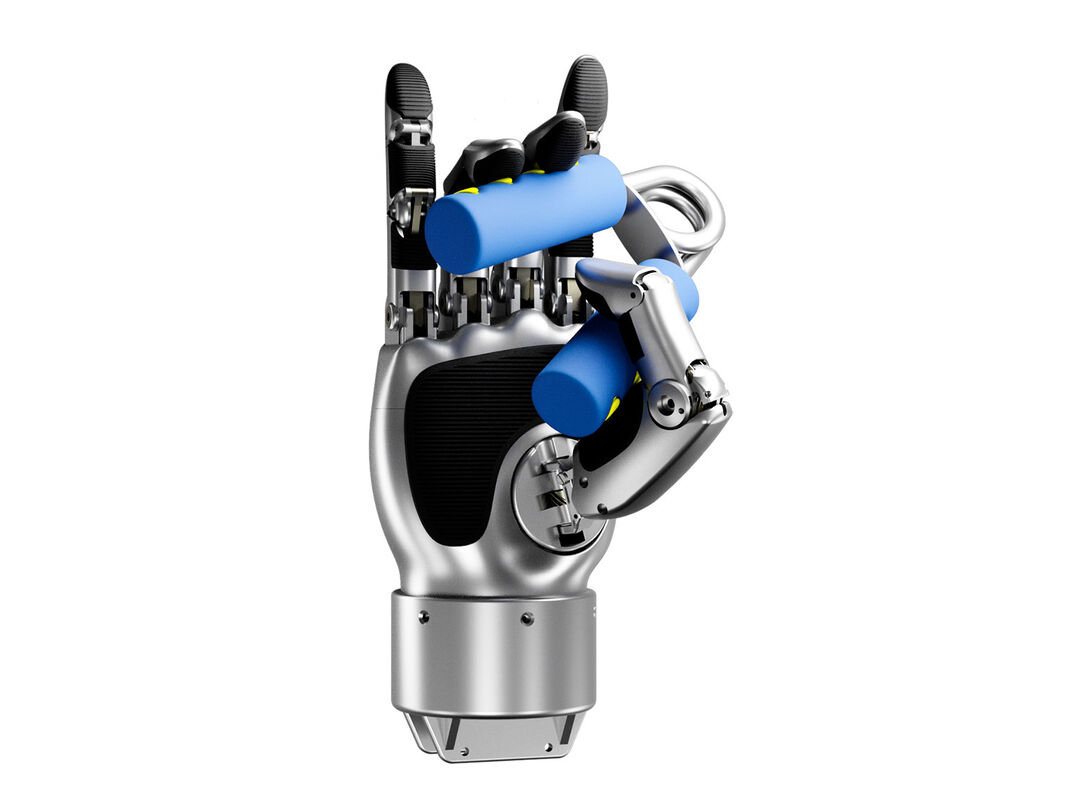
La main robotique HONPINE 07 est une main dextre haute performance avec 17 degrés de liberté (DoF). Alimentée par des moteurs développés en interne, elle équilibre le contrôle des coûts avec des performances fiables de préhension et d'opération, répondant à divers besoins d'application. Elle fournit des plugins ROS pour le développement secondaire, adaptés à l'éducation et à la recherche, à la préhension auxiliaire et à l'interaction intelligente, offrant une solution de main dextre efficace et économique pour les systèmes robotiques.
Caractéristiques de la main robotique dextre HONPINE 07
● Configuration humanoïde et multi-DoF
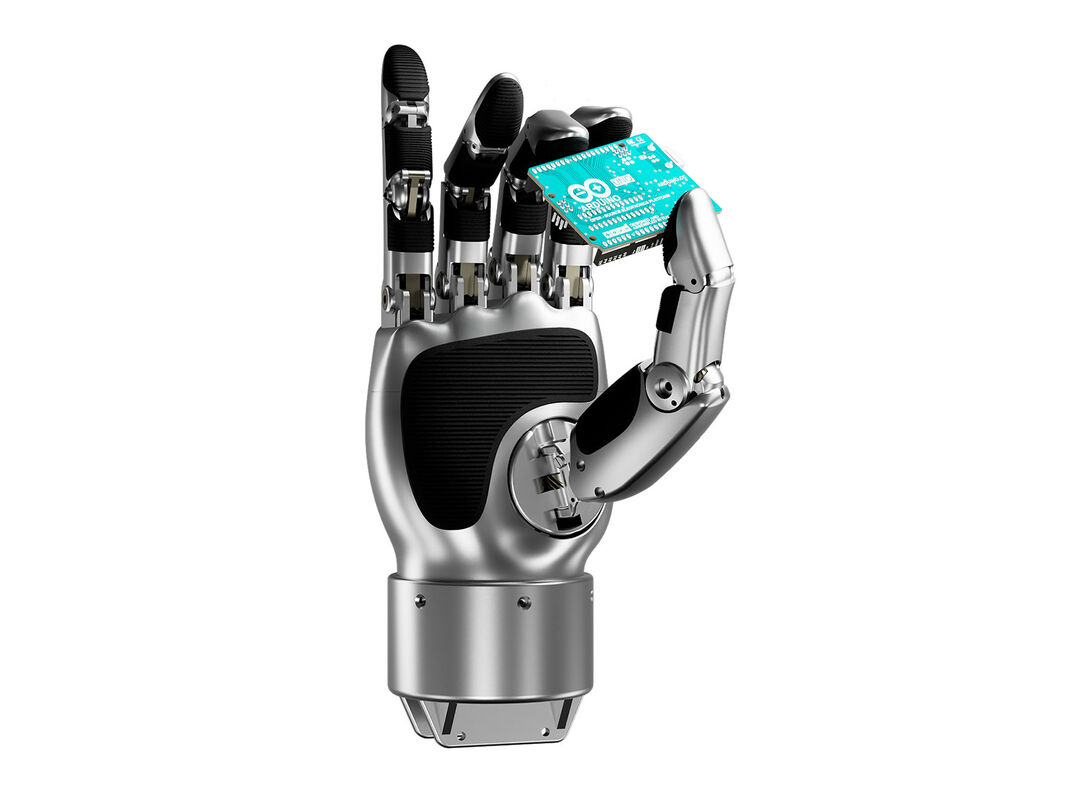
Imite fidèlement la structure de la main humaine, permettant une simulation précise
de diverses postures de préhension et d'opération pour s'adapter à des tâches complexes
scénarios.
● Auto-verrouillage et transmission à couple élevé
Le système d'entraînement à vis sans fin développé en interne fournit un couple élevé puissant
sortie et fonction d'auto-verrouillage, assurant un contrôle précis et un maintien hors tension
pour une sécurité accrue.
● Intégration Edge-Cloud et déploiement en un clic
L'architecture innovante edge-cloud exploite les bibliothèques de compétences cloud,
permettant un déploiement rapide des compétences opérationnelles sans codage, réduisant
les seuils d'utilisation et la difficulté de développement.
Méthodes de communication de la main robotique dextre HONPINE 07
● Bras robotiques pris en charge : UR, Franka, XArm, RealMan, Songling
● Méthodes d'acquisition de données prises en charge : gants de téléopération, gants exosquelettes, gants en métal liquide, vision, VR (Meta Quest 3)
● Simulateurs pris en charge : PyBullet, Isaac, MuJoCo
● Interfaces prises en charge : CAN, 485
● Exemple d'utilisation : ROS1, ROS2, Python, C++

 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères!